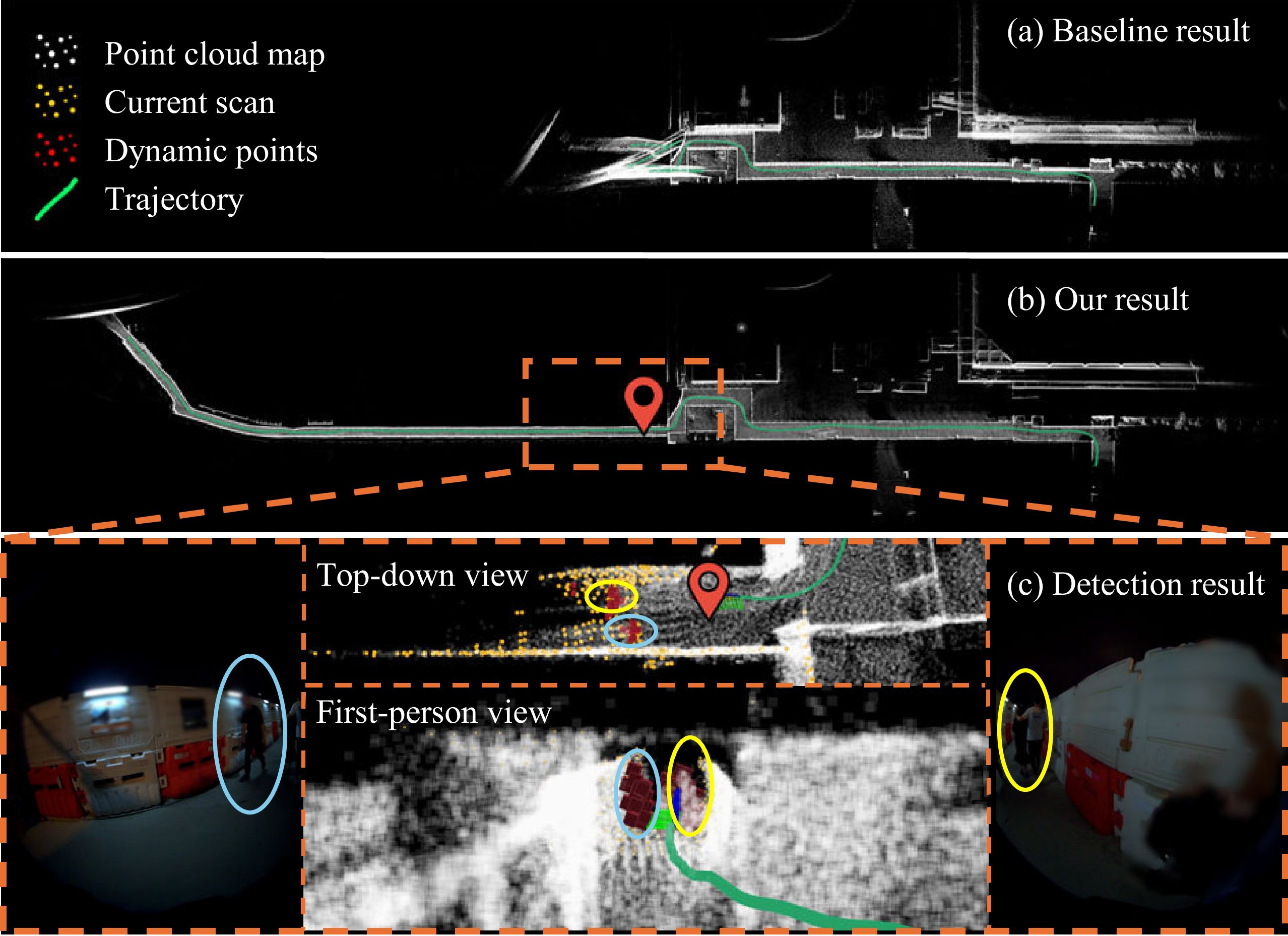
- October 2025: Our paper BTSA, on dynamic LiDAR-inertial odometry, has been accepted to IEEE Robotics and Automation Letters (RA-L).
- March 2025: Our paper GEODE, presenting a heterogeneous LiDAR dataset for benchmarking robust localization, has been accepted to The International Journal of Robotics Research (IJRR).
- February 2025: Our paper CaRtGS, on Gaussian splatting SLAM, has been accepted to IEEE Robotics and Automation Letters (RA-L).
- October 2024: Our paper S3E, presenting a multi-robot multimodal dataset for collaborative SLAM, has been accepted to IEEE Robotics and Automation Letters (RA-L).
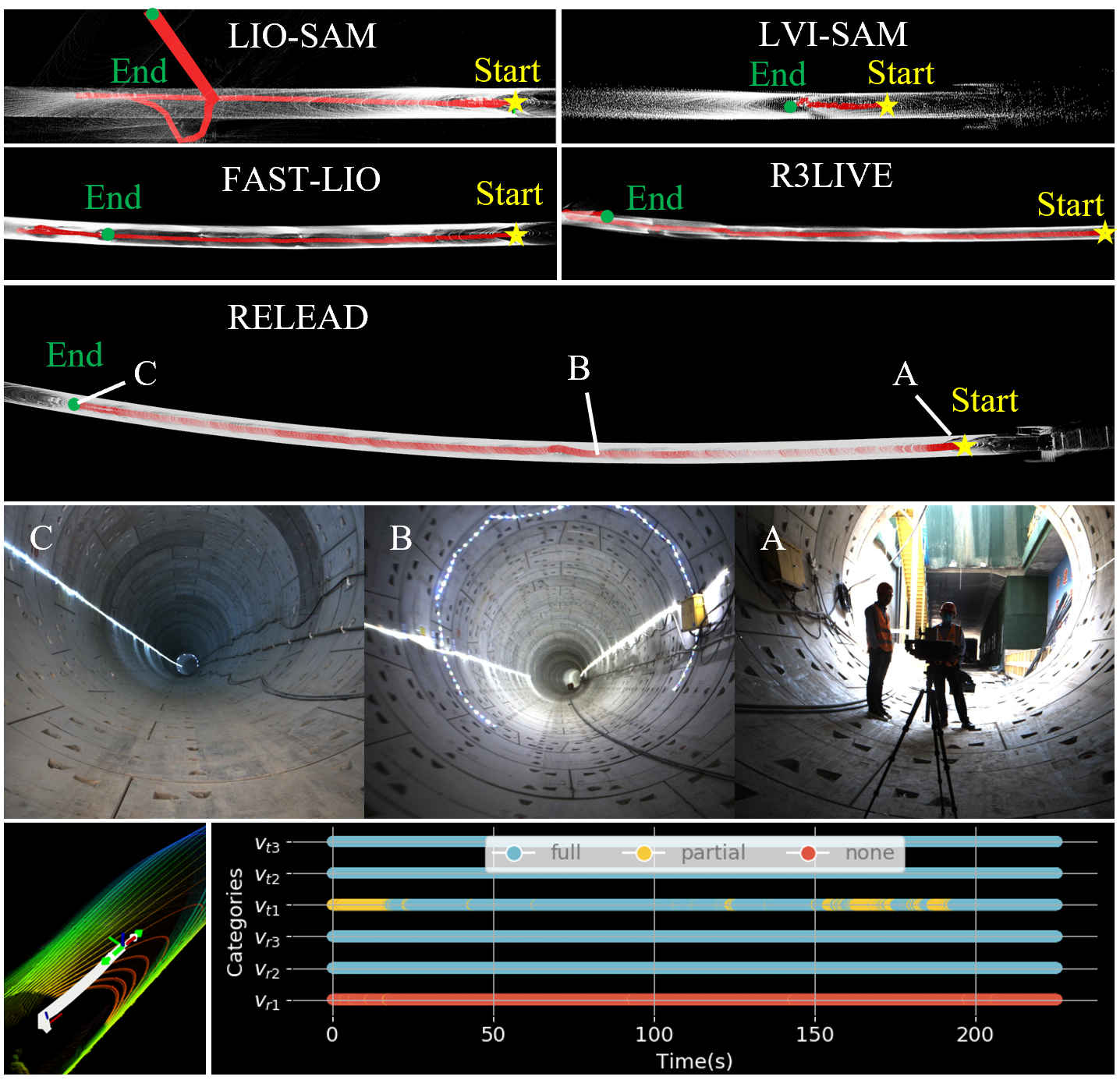
- January 2024: Our paper RELEAD, on resilient localization with degeneracy detection, has been accepted to ICRA 2024.
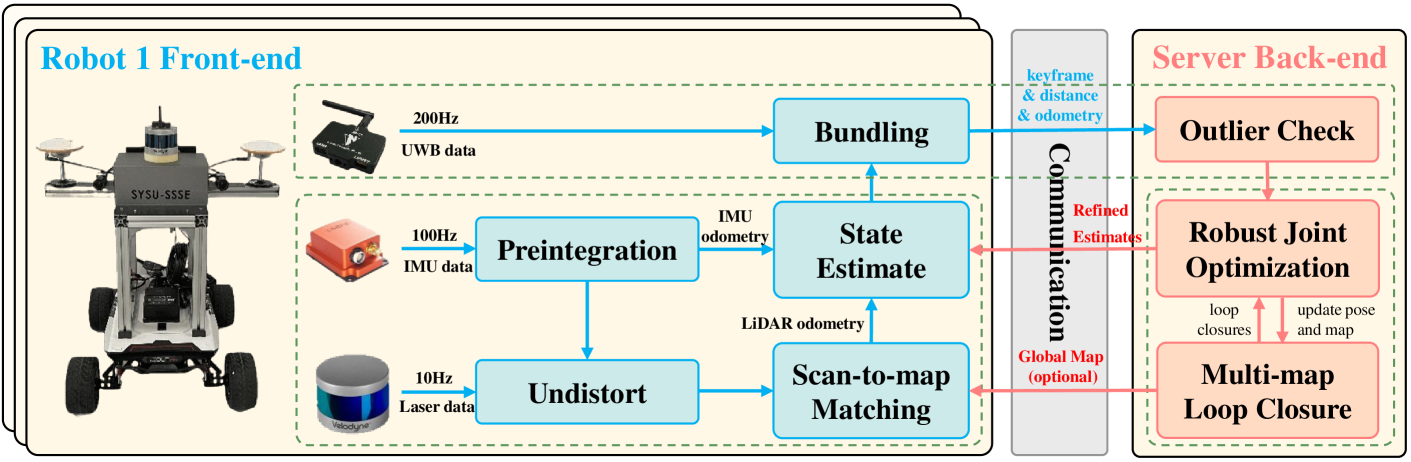
- January 2024: Our paper CoLRIO, on centralized multi-agent LiDAR-inertial odometry, has been accepted to ICRA 2024.
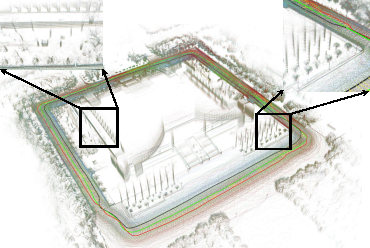
- December 2023: Our paper DCL-SLAM, on distributed collaborative LiDAR SLAM, has been accepted to IEEE Sensors Journal.

Hello, I'm Zhiqiang Chen
I am currently pursuing a Ph.D. at The University of Hong Kong (HKU). I completed both my bachelor’s and master’s degrees with honors at Sun Yat-sen University.
My research focuses on autonomy in intelligent mobile systems, with a particular interest in perception in dynamic environments for robotic interaction. This involves robust localization in complex and degenerate scenarios, constructing detailed geometric and semantic models, scene abstraction and understanding, and lifelong learning for autonomous mapping in unfamiliar settings.